Swartvast adviseert bij innovatieve inwinnings- en verwerkingsprocessen van geo-informatie, analyse van data en informatie en de vertaling daarvan naar welgeformuleerde publicaties
De technische achtergronden van laseraltimetrie: hoe werkt hoogtemeting met laser?
Inleiding
10 december 2009; aangepast 26 mei 2010
Swartvast heeft een diepgaande kennis van laseraltimetrie als meettechniek opgedaan. Een beknopt overzicht geven we hieronder. Zie voor meer details en toepassingen de projectpagina's over het AHN, de Werkgroep Grootschalige Laseraltimetrie en de artikelen en presentaties.
Inwinning met een aftastende laserstraal: laseraltimetrie
5 oktober 2009

Helikopter en laseraltiemetriesysteem in rek; twee GPS-ontvangers op masten aan weerszijden zorgen voor een betere positie- en standbepaling, het GPS-basisstation op de grond zorgt voor een differentiële positiebepaling. © Fugro Aerial Mapping
Laseraltimetrie of laserhoogtemeting, in het buitenland veelal lidar (light detection and ranging, analoog aan radar voor radiostraling) genoemd, maakt gebruik van pulsen laserlicht die door een scanner aan boord van een vliegtuig of helikopter worden afgevuurd op het aardoppervlak. Door van het gereflecteerde licht de looptijd te meten, wordt de afstand tussen oppervlak en vliegtuig bepaald. Ook is de hoek van de bundel bekend. Het instrument scant al vliegend een strook onder het vliegtuig.
Doordat met differentiële GPS de positie van het instrument nauwkeurig bekend is (waarbij ook de fase en atmosfeercorrecties worden berekend) en met een traagheidsnavigatiesysteem (INS) de stand van het platform kan worden berekend, is het mogelijk uit de looptijd van de laserpulsen de hoogte van het oppervlak in bijvoorbeeld het (RD, NAP)-stelsel te berekenen.
Het Actueel Hoogtebestand Nederland (AHN) is een voorbeeld van een hoogtebestand dat is gemaakt met laseraltimetrie.
Puntdichtheid en precisie
Een jaar of tien geleden was de pulsfrequentie van de laserscanner beperkt, evenals de meetprecisie en het inzicht in de foutenbronnen en calibratiemethoden. De vervaardigde hoogtemodellen waren gebaseerd op één laserpunt per 4x4 of 5x5 meter en hadden een precisie van op zijn best 15 cm. Inmiddels kunnen de meeste aanbieders met een pulsfrequentie van 250 kHz onder een langzaam vliegende helikopter en na een goede calibratie en verwerking hoogtemodellen vervaardigen met dichtheden tot 30 punten per vierkante meter, met een precisie van 5 cm standaardafwijking en 5 cm systematische fout in hoogte. Daardoor kwam een veeleisend toepassingsgebied binnen bereik: de modellering van hoogte en profiel van waterkeringen.
Meervoudige pulsregistratie
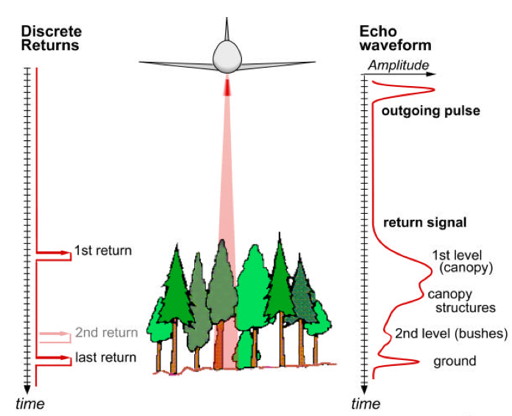
Registratie van meerdere reflecties van de laserpuls, waarmee bijvoorbeeld de top van de vegetatie kan worden onderscheiden van het maaiveld. © Ingenieur-Gesellschaft für Interfaces mbH
Moderne laserscanners registreren ook de intensiteit van de teruggekaatste puls en kunnen vier of meer reflecties van dezelfde puls op objecten met verschillende hoogte onderscheiden, bijvoorbeeld het bladerdek en het maaiveld. Er zijn tegenwoordig ook systemen die de totale golfvorm van het teruggekaatste laserlicht registreren, wat weer nieuwe toepassingsmogelijkheden toelaat. Ook worden vaak tegelijk luchtfoto's gemaakt. Deze extra informatie maakt zowel de automatische verwerking als de identificatie en interpretatie van de laserdata eenvoudiger.
Strookvereffening

De helikopter of het vliegtuig vliegt, afhankelijk van de vereisten van het project, op zo'n 400 meter hoogte en neemt stroken op van zo'n 400 meter breed. Door de nauwkeurige plaats- en standbepaling is van elke strook bekend waar hij precies op het aardoppervlak ligt. Niettemin kunnen twee naastgelegen stroken nog steeds kleine verschillen vertonen. Door op een geodetische manier aan de hand van daarvoor geschikte objecten deze verschillen te berekenen en te minimaliseren ('vereffenen'), kunnen de stroken zo gelegd worden dat in het eindproduct de verschillen niet meer te zien zijn. Zie de afbeelding hiernaast.
Bovendien zorgt dit proces ervoor dat een exacte uitspraak over de bereikte precisie kan worden gedaan. Daarmee kan worden gecontroleerd of het laseraltimetrieproduct voldoet aan de precisievereisten, zoals ze kunnen worden afgeleid uit de eindtermen.
Bij moderne laseraltimetrieprojecten is de precisie van de ligging en hoogte van de laserpunten reeds zodanig dat geen strookvereffening meer plaatsvindt. De data van overlappende stroken wordt integraal in het bestand opgenomen. Dit is ook de reden dat de dichtheid van de laserpunten daar ongeveer tweemaal zo hoog is. Wel kan aan de hand van daarvoor geschikte objecten die in beide stroken voorkomen en in hoogte en ligging heel precies in de data herkenbaar zijn (met name zadeldaken) berekend worden hoe groot de verschillen tussen de data uit de overlappende stroken precies is. Dit is een belangrijke maat voor de precisie.
Het gebruik van zadeldaken om de onderlinge ligging van de laserstroken te controleren en een uitspraak te doen over de precisie is een vereiste bij de uitvoering van het AHN-2.
Filtering of classificatie

Classificatie van de laserpuntenwolk in maaiveld (groen) en vegetatie (wit). © Fugro Aerial Mapping
Afhankelijk van de toepassing kan de geregistreerde puntenwolk nog nabewerkt worden. Voor reconstructie van gebouwen en obstakels gaat het primair om de punten die niet op het aardoppervlak (het 'maaiveld') liggen. Bij vegetatie kan het gaan om de verschillende reflecties op verschillende hoogten, om zo iets over de aard van de vegetatie te kunnen zeggen.
Het onderscheiden van de punten in verschillende categorieën of klassen is een vorm van classificatie. Bij het Actueel Hoogtebestand Nederland noemt men dit filtering, omdat alle hoogtepunten die niet op het maaiveld liggen moeten worden 'weggefilterd'.
Het AHN is een generiek landelijk bestand, dat zeer precies en gedetailleerd het maaiveld beoogt te representeren. Het betekent dat de reflecties van de laserstraal op vegetatie, bebouwing en andere objecten niet in het eindproduct zouden mogen voorkomen. De aannemers hebben hiervoor zeer geavanceerde filterprocedures ontwikkeld, waarbij op basis van het verloop van de hoogte, de steilheid en het voorkomen van hoge en lage reflecties door elkaar wordt bepaald welke laserpunten niet voldoen aan de definitie van het maaiveld.
Het belang van een juiste ligging van het maaiveld is voor het AHN zo groot dat van de aannemers wordt verwacht dat zij minutieus nagaan of de filtering op de juiste wijze is uitgevoerd. Daartoe inspecteren zij 100% van het gefilterde bestand.
Tot de producten van het AHN behoort niet alleen het maaiveldbestand, ook de uitgefilterde niet-maaiveld-laserpunten zijn als bestand verkrijgbaar. Dit bestand is voor bepaalde gebruikers zeer waardevol, omdat men er bijvoorbeeld de ruwheid van de vegetatie in uiterwaarden mee kan bepalen (voor het bepalen van de waterafvoer van de rivierbedding) en gebouwen driedimensionaal mee kan reconstrueren. Niettemin zijn specifiek hiervoor vervaardigde laseraltimetrieproducten vaak waardevoller omdat bij de productie daarvan de nadruk niet gelegen heeft op het maaiveld.
Interpolatie

Interpolatie van onregelmatig verspreide laserpunten naar een regelmatig raster of grid. © Rijkswaterstaat Meetkundige Dienst
De originele laserpuntreflecties zijn in het algemeen als databestand leverbaar; dit geldt ook voor het AHN. Dit zijn onregelmatige 'puntenwolken', die voor de meeste gebruikers lastig te verwerken zijn en bovendien kolossaal van omvang.
Omwille van een eenvoudiger gebruik worden deze puntenwolken geïnterpoleerd tot een rasterbestand. In het geval van het AHN-2 is dit één hoogtewaarde per 50 x 50 cm. Daarnaast vervaardigen de aannemers voor een grootschaliger gebruik (geodeten spreken overigens van kleinschaliger) een hoogtebestand met één hoogtewaarde per 5 x 5 meter.
Overigens kan dit interpoleren met verschillende algoritmen, maar ook met een verschillende doelstelling. Enige tijd geleden lag de nadruk vooral op het uitmiddelen van stochastische fouten en dus op het middelen van meerdere laserpunten tot één rastercel. Daarvoor is bijvoorbeeld de Inverse Squared Distance Weighting methode geschikt. Als ervan wordt uitgegaan dat de precisie van een enkele lasermeting voldoende is, kan de nadruk worden gelegd op het zo goed mogelijk representeren van het terrein. In dat geval is het berekenen van een rastercelhoogte met een Triangular Irregular Network (TIN) geschikt.
Advies en informatie: contact
Swartvast heeft, zoals uit deze en de andere pagina's al blijkt, een ruime ervaring met en een diepgaande kennis van laseraltimetrie en het AHN. Voor advies omtrent het gebruik van laseraltimetrie en het AHN wordt u van harte uitgenodigd contact op te nemen!
Met vriendelijke groeten,
Rens Swart